A personal story about badly fitting PPE shows reveals there’s still much more to be done to ensure every worker has the correct equipment to keep them safe and comfortable.
Apple’s Vision Pro VR headset has started new conversations on how we interact with the virtual world, so how can human factors improve our experience in the metaverse?
As the COP30 climate summit draws to a close in Brazil this week, how can human factors help businesses create tackle environmental issues and build a more sustainable future?
The challenges of living and working in space mean thinking differently about how we design new habitats for astronauts and how we create equipment that’s adapted for carrying out tasks in microgravity
How do human factors professionals develop skills, track strengths and gain recognition? Our all-new Professional Competency Checklist is your essential guide
This month’s Global Disability Summit has highlighted the need to create a world that’s more inclusive and shone a spotlight on the challenges faced by people with disabilities during the pandemic.
Artificial intelligence and robotics have been used to create an award-winning walking aid that could help transform the lives of people with mobility challenges.
Architects are seeing a growing trend for curved surfaces that boost wellbeing and help improve people’s moods. New technologies and techniques are making it easier to create the free-flowing structures from materials such as wood, concrete and glass, according to architecture website ArchDaily.
As temperatures start rising, it’s vital to keep babies safe from excessive heat. New research has looked at the most effective low-cost ways to protect infants outside in prams
Human factors is becoming one of the most talked about topics in veterinary care as more professionals recognise the difference it can make to improving performance and working environments.
Working from home has plenty of benefits but it can be easy to forget to take a break. New research reveals the mental and physical problems than can happen when you don’t remember to rest.
This year’s UK Disability History Month is highlighting the challenges faced by disabled people around employment and how workplaces can be made more accessible.
Digitalisation of systems is transforming every part of our lives, so how can we ensure the most vulnerable in our society benefit from digital healthcare developments?
A retired engineer has designed a new type of spade which he claims can help protect users from back strain by stopping them from having to bend over while digging, and can also give them even more power.
A new design for life-saving respiratory equipment could help protect firefighters from the risk of discomfort and injury while carrying out their vital work in dangerous conditions
The CIEHF has launched a new campaign to help people working with oxygen at the bedside of hospital patients. Leaks of the gas can cause fires and even explosions, meaning it’s critical to ensure it’s handled correctly – particularly when staff are working under great pressure and stress.
Human factors is already playing a role in helping meet the UN’s Sustainable Development Goals, but a study has highlighted areas where it could make an even bigger contribution to tackling the challenges facing our world.
The winner of this year’s RIBA Stirling Prize for architecture shows how great design can bring people together and improve health, wellbeing and a sense of shared community.
Using human factors and ergonomics expertise to break down barriers faced by home care staff will create a safer, enhanced system for workers and patients, new research has revealed.
Construction workers often suffer from pain and injury caused by their work but a new campaign aims to raise awareness of the risks they face and protect them from harm when handling heavy objects.
A new method of capturing data about how construction workers move while they’re carrying out tasks on-site could help protect them from high rates of injury
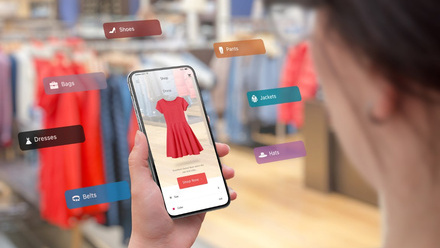
Some clothes shoppers are still reluctant to return to physical stores and prefer to spend their cash online but could augmented reality transform the experience of choosing a new outfit and lure customers back to the high street?
As one of the most commonly consumed drugs in the world, how is caffeine affecting people physically and mentally and what impact could it be having on our performance throughout a working day?
Patients and medical teams are improving interactions with each other, improving the treatment experience and building better connections by sharing details of their lives
Introducing human factors thinking to healthcare can create better working environments where staff feel included and patients benefit from better outcomes, according to a leading surgeon.
If you’ve got a human factors hero whose work deserves wider recognition then now’s your chance to nominate them in our annual awards, with categories covering everything from impact to innovation.
To mark our 75th anniversary last year, a special issue of the journal Ergonomics has been released exploring both the history and the future of our profession
Companies trialling a four-day week have seen so many benefits they’ve opted to make a permanent change, so could this be the start of a major shift in the way we think about our working patterns?
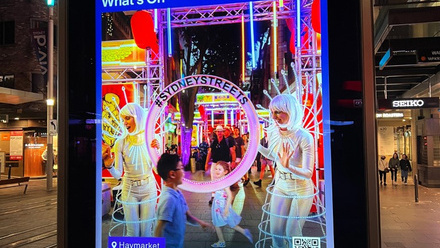
Digital billboards that sparked complaints from city residents have been transformed into community information screens designed to solve local problems and help tourists feel more welcome.
‘Decision fatigue’ has been blamed for depleting our power to make effective choices but could its impact on the way we think have previously been over estimated?
Could a radical rethink about how we view cars and the role of personal vehicles be what’s needed if we want to find sustainable transport solutions that work for all road users?